




Drone drivers get drift lessons
 Print
Print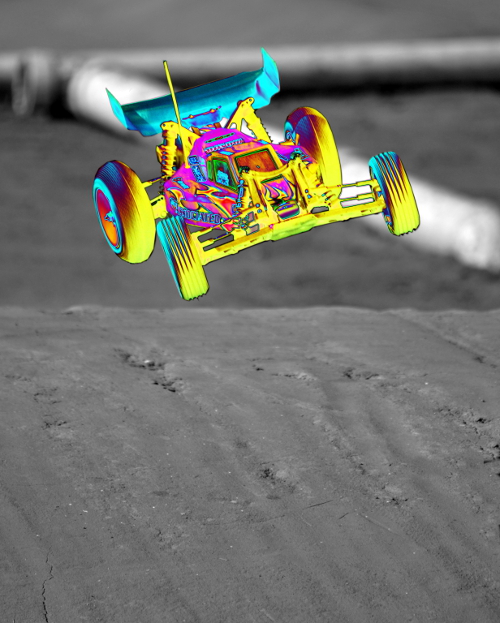 Drone researchers have created an autonomous system that pushes the outer limits of extreme driving.
Drone researchers have created an autonomous system that pushes the outer limits of extreme driving.
Reports this week reveal a new way to help keep a driverless vehicle under control as it manoeuvres in difficult handling situations, in order to help make self-driving cars safer under hazardous road conditions.
Engineers at Georgia Tech in the US have tested the new technology by racing, sliding, and jumping one-fifth-scale, fully autonomous auto-rally cars at the equivalent of over 140 km/h.
The technique uses advanced algorithms and onboard computing, in concert with installed sensing devices, to increase stability while maintaining performance.
The study was sponsored by the US Army Research Office.
“One of our principal goals is to infuse some of the expert techniques of human drivers into the brains of these autonomous vehicles,” says Prof Panagiotis Tsiotras, an expert on the mathematics behind rally-car racing.
The technique was tested using two custom-built cars with electric motors, a motherboard with a quad-core processor, a potent GPU, and a battery.
Each vehicle has two forward-facing cameras, an inertial measurement unit, and a GPS receiver, along with sophisticated wheel-speed sensors.
The rolling robots were able to test the team’s control algorithms without any need remote devices or computation, except for a GPS receiver.
Traditional robotic-vehicle techniques use the same control approach whether a vehicle is driving normally or at the edge of roadway adhesion, Tsiotras explained.
The Georgia Tech method - known as model predictive path integral control (MPPI) - was developed specifically to address the non-linear dynamics involved in controlling a vehicle near its friction limits.
The researchers used a stochastic trajectory-optimisation capability, based on a path-integral approach, to create their MPPI control algorithm.
The team combined large amounts of handling-related information with data on the dynamics of the vehicular system, to compute the most stable trajectories.
The vehicle carries a high-power graphics processing unit (GPU) to continuously analyse data coming from global positioning system (GPS) hardware, inertial motion sensors, and other sensors.
The onboard hardware-software system performs real-time analysis of a vast number of possible trajectories and sends handling decisions to the vehicle moment by moment.
In essence, the MPPI approach combines both the planning and execution of optimised handling decisions into a single highly efficient phase.
It is regarded as the first technology to carry out this level of control data processing in real time.
Check out the video below for an example of the system in practice.