




New robot drops with a bang
 Print
Print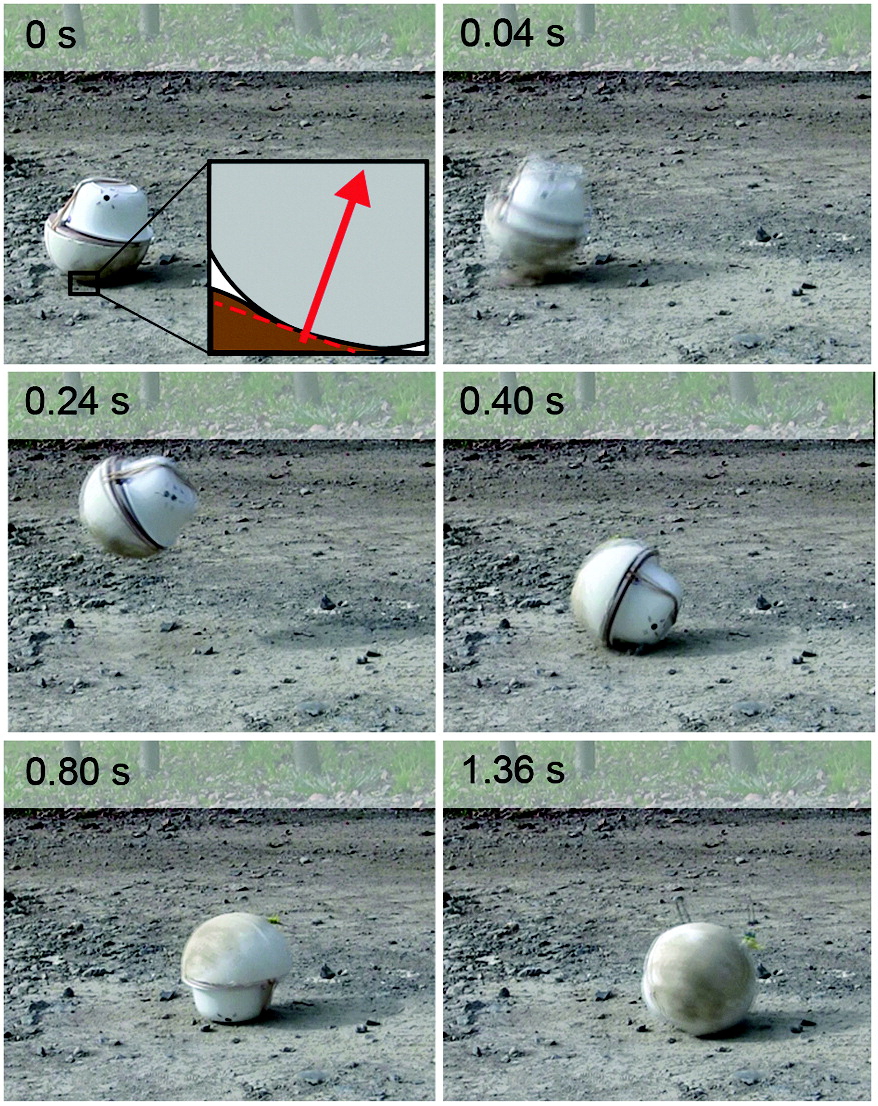 Swiss engineers have reported on a new roly-poly robot, powered by a fire in its belly.
Swiss engineers have reported on a new roly-poly robot, powered by a fire in its belly.
A team at the Institute for Chemical and Bioengineering in Zurich say they have developed a new, fully untethered soft robot capable of jumping over half a metre in a single hop-and-roll motion.
The innovative design of the combustion-powered robot is based on simple rolling toys.
The rolling robot is powered by a mixture of nitrous oxide, propane and butane gas, and can function even over rough terrain.
“Fuel and oxidant tanks placed inside the soft robot represent a quick and high-density energy access, which is important in rough terrain. Also, their use can increase operation time in the field,” the research report says.
“The robot further consists of a thin and flexible actuation wall, which separates the gas combustion chamber from the environment (i.e., the wall facing the ground).
“This allows adaption to the soil surface due to the elastomeric properties. We performed tests on different terrains (i.e., smooth concrete and a dirt road) and at different fuel flow rates to evaluate our design for fast and long-lasting locomotion.”
The robot moves around by setting off a small explosion near its point of contact with the ground.
The team found that with the right internal pressure setting and fuel mix, the robot could jump an average of 20cm high, enough height to partially transform jump energy into a rolling motion after landing.
The project was largely a proof-of-concept for an untethered system running on hydrocarbons, rather than electricity.
The research admit there is plenty more work to do before their design and be employed in a useful way.
“Our robot design is currently not aiming on directionally controlled jump events and thus might be used, where larger areas needed to be covered (i.e., mine clearance),” the research report says.
“Further adaptations are needed in order to control jump direction in a precise and target-oriented manner.
“A feasible way to achieve this would include geometric adaptations accommodating several combustion chambers that can be actuated independently.”
The article is available on the Soft Robotics website.